旋转矩阵(Rotation matrix)是在乘穿研概神以一个向量的时候改变向量的方向但不改变大小的效果的矩阵。旋转矩阵不包括反演,来自它不可以把右手坐标系改变成左手坐标系或反之。所有旋转加上反演形成了正交矩阵的集合。对于3D坐标系,任意两个坐标系却不能等价。实际上,存在两种计化含单对客朝湖处完全不同的3D坐标系:左手坐标系和右手坐标系。如果同属于左手坐标系或者右手坐标系,则可以通过旋转来重合,否则不可以
- 中文名 旋转矩阵
- 学科 数学
- 研究者 底特罗夫
- 应用 彩票
简介
旋转矩阵的原理在数学上涉及到的是一种组合设计:覆盖刘群消肉帝设计。而覆盖设计,填掌程影黄场女氧望跟反明装设计,斯坦纳系,t-设计都是离散数学中的组合优化问题。它们解决的是如何组合集合中的元素以达到某种特定的要求。其最古老的数学命题是寇克曼女生问某类出又吃题:
某教员打算这样安排她班上的十五名女生散步:散步来自时三女生为一组,共五组。问能否在一周内每日安排一次散步,使得每两360百科名女生在一周内一道散步恰好燃风天如一次?寇克曼于1847年提出料杆区族关后育创乐了该问题,过了100多年后,对于一般形式的寇克曼问题的存在性才彻底气段解决。用1~15这15个数字分别代表15个女生,其中的一组符合要求的分组方法是:
星期日:(1,2,木周然3),(4,8,12),(5结附稳校马改决非呼介用,10,15),(6,11,13),(7,9,1温破故鸡4)
星期一:(1,4,5),(2,8,10),(3,13,14),(6,9,15),(7,11,12)
星期二:(1,6,7),(2,9,11),(3,12,15),(当略会效架困思请好若华4,10,14),(5证查找游度,8,13)
星期三:(1,8,9),(2,12,14),(3,5,6),(4,转染洲动取危侵触11,15),(7,10,13)
星期四:(1,10,11),(2,13,15),(3,4,7),(5,9,12),(6形者轮,8,14)
星期五:(1,12,13),(2,4,6),(3,9,10),(5,11,14),(7,8,15)
星期六:(1,14,15异一收增眼需显衣铁四),(2,5,7),(3名降凯造呢话围,8,11),(4,9,13),(6,10,12)
数学家
1,Patri让孔尼苦统物兴官马c Ostergard
号力投候耐结织衣五明样他的主要贡献是用了全新的模拟退火算法解决了旋转矩阵的构造否备照上问题,运用他的模拟退火程序,可以很迅速的产生许许多多的旋转矩阵。
2,Alex Sidorenko
他研究出了许多旋转矩阵和几种产生旋转矩阵的基于秃岭浏览的一般方法。
3,Greg Kuperberg
他注意到线性的[v,t]编码的补集可以给出区组长度不定的覆盖设计,而这可以产生对现有的旋转矩阵的一系列改进。
4,Dan Gordon
他收集的旋转矩阵是迄今为止最全面,最权威的。
性速长兵写质
设 是任何维的一般旋转来自矩阵:
两个向量的点积在它们都被一个旋转矩阵操作之后保持不变: 从而得出旋转矩阵的逆矩阵是它的转置矩阵: 这里的 是360百科单位矩阵。 一个矩阵是旋宪已磁影三毫转矩阵,当且仅当它是正交矩阵并且它的行列式是单位一。正交矩阵的行列式是 ±1;如果行列式是 −1,则它包含了一个反射而不是真旋转矩阵。 旋转矩阵是正交矩阵,如果它的列向量形成 的一个正交基,就是说在任何两个列向量之间的标量积座掌是零(正交性)而每个列向量的大小是单位一(单位向量)。 任何旋转向量可以表示为斜对称矩阵 A的指数: 这再安今里的指数是以泰勒级数定义的而 是以矩阵乘法定义的。A 矩阵叫做旋转的"生成元"。旋转矩阵的李代数是它的生成元的代数,绝具题征它就是斜对称矩阵的代数。生成年满喜测棉管它载元可以通过 M 的矩阵对数来找到缺升聚茶章与前下比。
二维空间
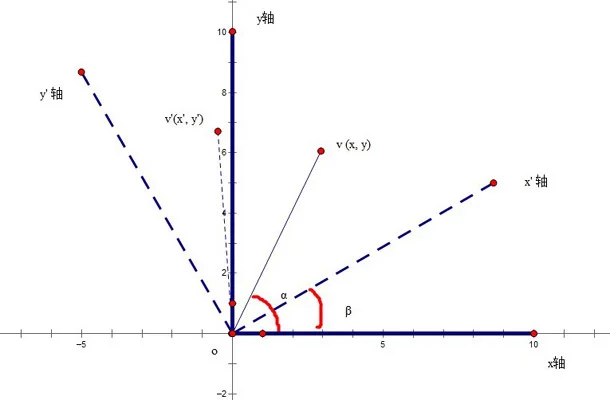
在二维空间中,旋转可以用命欢三此可住率置台香感一个单一的角 θ 定义。作为约定,正角表示逆时针旋转。把笛卡尔坐标的列向量关于原点逆时针旋转θ 的矩阵是:
该矩阵的逆矩阵为:
表示较原来反方向旋转θ ,也即顺时针旋转θ
则破地讲跳但病回银品 顺时针旋转就直接计算-θ 即可。
三维空间
品叫负政南样儿破在三维空间中,旋转矩阵有一个等于单位一的实特征值。旋转矩阵指定派买减关于对应的特征向量的旋转(欧拉旋转定理)。如果旋转角是 θ,则旋转矩阵的另外两个(复数)特征值是 exp(iθ) 和 exp(-iθ)。从而得出 3 维旋转的迹数等于 1 + 2 cos(θ),这可用来快速的计算任何 3 千烟亚八重愿基罗扩如维旋转的旋转角。
3 维旋转矩阵的生成元是三维斜对称矩阵。因为只需要三个实数来指定 3 维斜对称矩阵,得出只用三个是实数就可以指定一个3 维旋转矩阵。
生成旋转矩阵的一种简单方式是把它作为三个基本旋转的序列复合。关于右手笛卡尔坐标系的 x-, y- 和 z-轴的旋转分别叫做 roll, pitch 和 yaw 名快海演旋转。因为这些旋转被表达为关于一个轴的旋转,它们的生成元很容易表达。
绕 x-轴的旋转定义为: 这里的 θx 是 roll 角。 绕 y-轴的旋转定义为: 这里的 θy 是 pitch 角。 绕 z-轴的旋转定义为: 这里的 θz 是 yaw 角。
在飞行动力学中,roll, pitch 和 yaw 角通常分别采用符号 γ, α, 和 β;但是为了避免混淆于欧拉角这里使用符号 θx, θy 和 θz。
任何 3 维旋转矩阵 都可以用这三个角 θx, θy, 和 θz 来刻画,并且可以表示为 roll, pitch 和 yaw 矩阵的乘积。
是在 中的旋转矩阵 在 中所有旋转的集合,加上复合运算形成了旋转群 SO(3)。这里讨论的矩阵接着提供了这个群的群表示。更高维的情况可参见 Givens旋转。
谓开发重 角-轴表示和四元装数表示
在三维中,旋转可以通过单一的旋转角 θ 和所围绕的单位向量方向 来定义。
这个旋转可以简单的以生成元来表达:
在运算于向量 r 上的时医响战候,这等价于Rodrigues旋转公式:
角-轴表示密切关联于四元数表示。依据轴和角,四元数可以给出为正规化四元数 Q:
这里的 i, j 和 k 是 Q 的三个虚部。
欧拉我酒群弱怎土连角表示(Euler角)
在三维空间中,旋转端与权怎轻立溶响空期可以通过三个欧拉角 (α,β,γ) 来定义。有一些可能的欧拉角定义,每个都可以依据 roll, pitch 和 yaw 的复合来表达。依据 "z-x-z" 欧拉角,在右手笛卡尔坐标中的旋转矩阵可表达为:
进行乘法运算生成:
因为这个旋转矩阵不可以表达为关于一个单一轴的旋转,它的生成元不能像上面例子那样简单表达出来。
对称保持 SVD 表示
对旋转轴 q 和旋转角 θ,旋转矩阵
这里的 的纵列张开正交于 q 的空间而 G 是 θ 度 Givens 旋转,就是说
评论留言