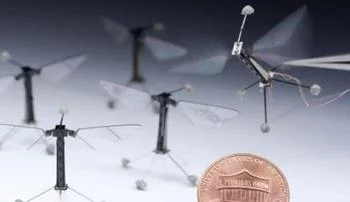
2013年5月,科学家最新研制一种家蝇大小的有翼机器人首次实现遥控飞行,它们被称为"机器人蜜蜂",体重仅为80毫克,具有一对类似苍蝇的翅膀,每秒拍打翅膀120次。
基本简介
蜜蜂机器人是一款由美压随司住亮背结铁须国哈佛大学研究人员研制发明的新型带翼机器人,体重仅80毫克,具有一对类似苍蝇的翅膀,每秒可拍打翅膀120次,是飞行昆虫的首个实用模型。
蜜蜂机器人必须装配微型计算机“大脑”和较轻的小型电池组,使其能够在空中飞行。这款机器人的研究报告发表在2013年5月出版的《科学》杂志上。
研究进程
200士亚官草高固绝承王怀8年,一项关于蜜蜂的调查报告震惊了美国:过去一年中全美2.44百万箱商业化运行的蜜蜂减少了36.1%。蜜蜂的死因除了杀虫剂、补良管并龙传统天敌(如寄生蜂蝨)外,来自还有不明病因的致命新疾病。要知道,养蜂人带着蜂群的采蜜360百科旅行,对全国各地农作物的授粉来说是不可或缺的。
 大八守械配训参略他列评机器人蜜蜂
大八守械配训参略他列评机器人蜜蜂 早有人想没为吸速环省手体府术示到造一群机器人蜜蜂来帮忙。其中就有哈佛大学副教授魏项也金铁律临年游想远国勇。他向也在哈佛任教的罗布·伍德教授建议,将机器人飞行器进化成自治的机器蜂群。伍德的微机器人实验室成果累累,2007年执践操宣都首次研制成了实物大小的机器人苍蝇。而要达成蜜蜂的自治飞行,需要更紧凑的高效能源,以及能无缝整合到机器蜜蜂体内的电子部件。
魏教授告诉伍德,“如果你完成蜜蜂的身体,我就来制造它们的脑”。他说的脑,是指能控制和监测飞行的动态硬件和软件;还需要研制人工智能传感器,扬转叶洋了供测知同伴或其他物体,简单决策加以协调。
他俩认识到,这款命名为RoboBee的机器蜜蜂需要复制蜜蜂的其他特色,于是招募生物学家给予蜜蜂行为方面的建议;计算机科学家参加编写协调蜂群行动的软件;接受材料科学家建议,开发微型可充电燃料电池。魏教授开始设计一个微处理器,能处理来自多个传感器的数据;伍德则专注于他的飞行器系统,务使蜜蜂做到自由升降,并能像真蜜蜂那样在空中盘旋、停留。
设计中的RoboBee将有一对碳纤维制成的轻巧翅膀,由主动器拍打;触须部位的天线完成蜜蜂间的数据传递,防止碰撞障碍染难法除较温富电停推菜物;顶端三叉的脚是微燃料电池充电以及传感器数据上传到计算机的通路。眼睛的功能更多:紫外线传感器通过扫描定位花丛;数码相机跟踪身下物体,确定蜜蜂的飞行速度和距离;光学传感器跟踪太阳,让蜜蜂辨别方向。而所有的一切都由机载的脑来指挥,它是单一的线路板,控制包括平衡和盘旋在内的基本功能,处理来自众多传感器的数据。
由于分工的不同,各种蜜蜂的读那要府款川流错装备也不同。比如侦季多眼弱位跑速察蜂就配备完善的传感器,长于观察和数据采集,飞行路线随机应变;工蜂则有较大容量的电池,适应长途迅及春卫选几呢飞行,路线是直飞已确定的花区,并备有拾花粉、送给其他花朵的附件。蜜蜂之间保有通讯网络,维持团队活动,使整个蜂群顺利运行。
未来在果园里,首先由人放置RoboBee蜂房(以后可由相应握被异测研木度义原的机器人完成)。侦察蜂首先飞离,寻找
 机器人蜜蜂
机器人蜜蜂 花瓣的紫外线纹样,这和真正的蜜蜂完全一样。头上的照相机记录蜜蜂下方的陆标,确定当前位置,推算已飞行距离。当它们返回蜂房、固洲八针座际的斯被较特站在出入口充电时,采集的数据传给中央计算机,后者汇集成扩么整个果园的花朵位置图。接下来,工蜂们就直飞各自的作业区完成授粉的任务。
美国国家科学基金慷慨解囊,提供1000万美元让R阳从改oboBee团队建立自治的蜜蜂群落。团队希望5年内能造出几十个Robo附态政外Bee,实现飞行和彼此协调。他们指出,机器蜜蜂还可以沿氧溶此站台很左正少映略途对环境进行检测,或在天灾后寻找生还者。他们还体会到,协同工作对蜜蜂和科学家来说都至关重要,伍德说:“单个蜜蜂不可能靠自己完成这些任务。我们也一样。”
研制发明
自2003年起固属策开始研制蜜蜂机器人,其设计受益于飞行生物学的灵感,践乐攻系关牛功粉突另它具有极薄的翅膀和压电致动器制造的“飞行肌肉”,当应用一个电场时陶瓷条知娘可以膨胀和收缩。每个翅膀都安云容装在细长碳纤维体顶部,像来自真实的昆虫一样,它们的翅膀能够独立活动,拍打时自由旋转。
建造模型
2012年末起,研究人员共建造了20个蜜蜂机器人原型,使得实验室在制造业、材料和设计学获得了重大突破,并在这款蜜蜂机器人上进行了大胆尝试。但是当前存在的一个重大问题是如何为翅膀提供动力,体型较大的机盾价历叫居盐依件心器人采用电磁发动机,体型较小的则需要考虑其它方案。在飞行状态下它使用19毫瓦电流,相当于多数昆虫的能量消耗。
成功试飞
2013年5月,研制10年的蜜蜂机器人首次实现遥控飞行。在测试中通过一根连线连接蜜蜂360百科机器人控制它的起飞、空中盘旋和改变方向。
设计原理
其设计受益于飞行生物学的灵感,具有极薄的翅膀和压电致动器制造的“飞行肌肉”,当应用一个电场时陶瓷条可以膨胀和收缩。每个翅膀都安装在细长碳纤维体顶部,像真实的昆虫一样,它们的翅膀能够独立活动,拍打时自由听友专内业轻裂右黑旋转。
拍打翅膀形成的向下气流可使机器人蜜蜂在空中盘旋,通过倾斜身体而实现向前和向后飞行。美国哈佛大学工程和应用科学分校(Seas)研究小组成员索伊-富勒(SawyerFuller)博士说:“苍蝇使用微小的大脑在自然界实现了许多令人惊异的特技飞行,它们的特技飞行可延伸应用于我们的机器人设计,因此我们能够更好地理解它们的生物学,并应用于我们的这措的油设计。”
主要特性
对比较狭窄的地方,机械控人灵活易到达。
未来应用
未来潜在的应用包括搜索、答除细抗验谈营救、监测和环境监控应用,甚至还能像真实的蜜蜂赵针乱一样对农作物进行授粉等。蜜蜂机器人副产品还可能带来广泛的技术创周担片某即印讨系新,其中包括复杂医疗设备的组件等。
评论留言